#include <node-core.h>
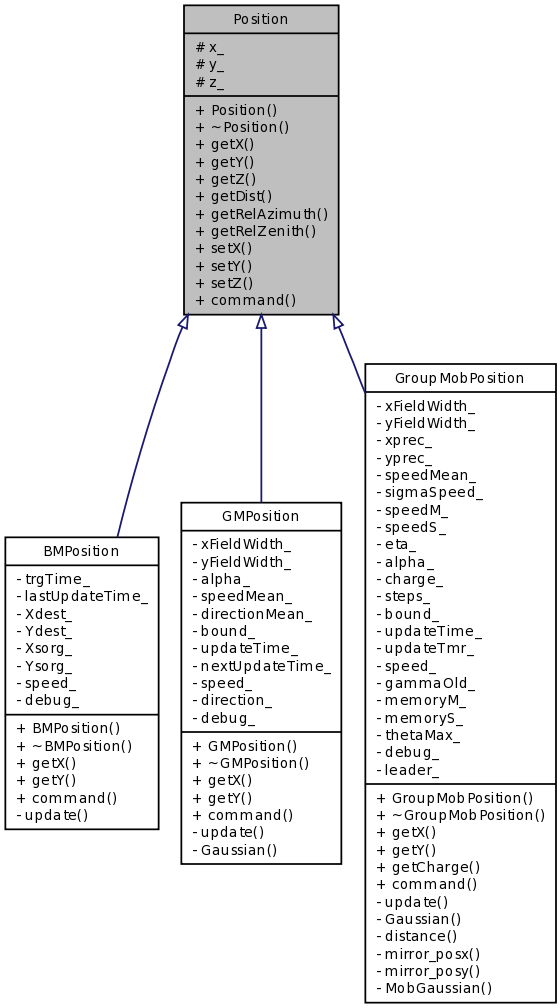
Inheritance diagram for Position:
Public Member Functions | |
| Position () | |
| virtual | ~Position () |
| virtual double | getX () |
| virtual double | getY () |
| virtual double | getZ () |
| virtual double | getDist (Position *p) |
| virtual double | getRelAzimuth (Position *p) |
| virtual double | getRelZenith (Position *p) |
| virtual void | setX (double x) |
| virtual void | setY (double y) |
| virtual void | setZ (double z) |
| virtual int | command (int argc, const char *const *argv) |
Protected Attributes | |
| double | x_ |
| double | y_ |
| double | z_ |
Definition at line 52 of file node-core.h.
| Position::Position | ( | ) |
Position constructor
Definition at line 44 of file node-core.cc.
| Position::~Position | ( | ) | [virtual] |
Position destructor
Definition at line 49 of file node-core.cc.
| double Position::getX | ( | ) | [virtual] |
Get the current projection on x-axis of the node postion
Reimplemented in BMPosition, GMPosition, and GroupMobPosition.
Definition at line 95 of file node-core.cc.
References x_.
Referenced by command(), MFullPropagation::command(), GroupMobPosition::distance(), WirelessPhyTracer::format(), AodvModule::forward(), getDist(), WirelessChModule::getInfluencedNodes(), WirelessChModule::getPropDelay(), DumbWirelessChModule::getPropDelay(), UmtsWirelessChModule::getPropDelay(), getRelAzimuth(), getRelZenith(), SimplePathLoss::Pr(), MrclTwoRayGround::Pr(), MrclFreeSpace::Pr(), AodvModule::sendRequest(), MFullPropagation::Shadowing(), and GroupMobPosition::update().
| double Position::getY | ( | ) | [virtual] |
Get the current projection on y-axis of the node postion
Reimplemented in BMPosition, GMPosition, and GroupMobPosition.
Definition at line 100 of file node-core.cc.
References y_.
Referenced by command(), MFullPropagation::command(), GroupMobPosition::distance(), WirelessPhyTracer::format(), AodvModule::forward(), getDist(), WirelessChModule::getInfluencedNodes(), WirelessChModule::getPropDelay(), DumbWirelessChModule::getPropDelay(), UmtsWirelessChModule::getPropDelay(), getRelAzimuth(), getRelZenith(), SimplePathLoss::Pr(), MrclTwoRayGround::Pr(), MrclFreeSpace::Pr(), AodvModule::sendRequest(), MFullPropagation::Shadowing(), and GroupMobPosition::update().
| double Position::getZ | ( | ) | [virtual] |
Get the current projection on z-axis of the node postion
Definition at line 105 of file node-core.cc.
References z_.
Referenced by command(), getDist(), and getRelZenith().
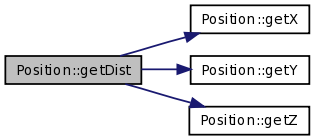
| double Position::getDist | ( | Position * | p | ) | [virtual] |
Returns the distance from the other given position object
| p | pointer to the other given position object |
Definition at line 110 of file node-core.cc.
References getX(), getY(), and getZ().
Referenced by MPhyTracer::format(), MFullPropagation::getGain(), and MFreeSpace::getGain().
Here is the call graph for this function:
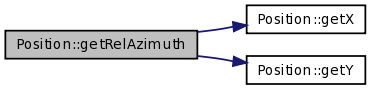
| double Position::getRelAzimuth | ( | Position * | p | ) | [virtual] |
Return the relative azimuth (angle on the ) of *p with respect to *this
| p |
Definition at line 119 of file node-core.cc.
References getX(), and getY().
Here is the call graph for this function:
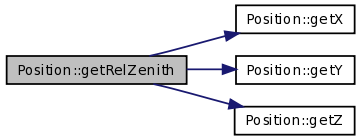
| double Position::getRelZenith | ( | Position * | p | ) | [virtual] |
Return the relative zenith (polar angle in spherical coordinates) of *p with respect to *this
| p |
Definition at line 127 of file node-core.cc.
References getX(), getY(), and getZ().
Here is the call graph for this function:
| void Position::setX | ( | double | x | ) | [virtual] |
Set the projection on x-axis of the node postion
| x | value to be set as projection on the x-axis of the node position |
Definition at line 136 of file node-core.cc.
References x_.
Referenced by command().
| void Position::setY | ( | double | y | ) | [virtual] |
Set the projection on y-axis of the node postion
| y | value to be set as projection on the y-axis of the node position |
Definition at line 141 of file node-core.cc.
References y_.
Referenced by command().
| void Position::setZ | ( | double | z | ) | [virtual] |
Set the projection on z-axis of the node postion
| z | value to be set as projection on the z-axis of the node position |
Definition at line 147 of file node-core.cc.
References z_.
Referenced by command().
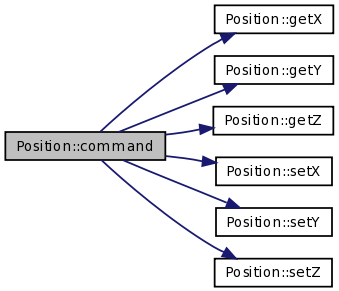
| int Position::command | ( | int | argc, | |
| const char *const * | argv | |||
| ) | [virtual] |
TCL command interpreter. It implements the following OTcl methods:
Moreover it inherits all the OTcl method of TclObject
| argc | number of arguments in argv | |
| argv | array of strings which are the comand parameters (Note that argv[0] is the name of the object) |
Reimplemented in BMPosition, GMPosition, and GroupMobPosition.
Definition at line 53 of file node-core.cc.
References getX(), getY(), getZ(), setX(), setY(), and setZ().
Referenced by GroupMobPosition::command(), GMPosition::command(), and BMPosition::command().
Here is the call graph for this function:
double Position::x_ [protected] |
X-axis projection value of the node postion
Definition at line 160 of file node-core.h.
Referenced by BMPosition::command(), getX(), GroupMobPosition::getX(), GMPosition::getX(), BMPosition::getX(), setX(), GroupMobPosition::update(), GMPosition::update(), and BMPosition::update().
double Position::y_ [protected] |
Y-axis projection value of the node postion
Definition at line 162 of file node-core.h.
Referenced by BMPosition::command(), getY(), GroupMobPosition::getY(), GMPosition::getY(), BMPosition::getY(), setY(), GroupMobPosition::update(), GMPosition::update(), and BMPosition::update().
double Position::z_ [protected] |
Z-axis projection value of the node postion
Definition at line 164 of file node-core.h.
 1.5.2
1.5.2